




会议期间,项目负责人鲁光泉教授具体汇报了项目总体进展、任务指标完成情况、成果水平及创新性、应用示范及推广情况、组织管理及档案归档等情况。专家组严格按照项目任务书约定,对项目目标和考核指标完成情况进行了综合绩效评价,对项目的完成情况给予了充分肯定。
“车路协同系统要素耦合机理与协同优化方法”项目于2019年3月正式获科技部批准立项,由北京航空航天大学牵头,项目负责人是鲁光泉教授,联合清华大学、同济大学、浙江大学、吉林大学、交通运输部公路科学研究所、长安大学、北京工业大学、中山大学、重庆交通大学、重庆邮电大学、北方工业大学、江苏大学、苏州大学、昆明理工大学共15家单位共同承担,是北京航空航天大学交通科学与工程学院承担的第一项国家重点研发计划项目。
项目面向自动驾驶车辆与人工驾驶车辆混行条件下的车路协同系统,聚焦系统中的驾驶人、车辆、道路三大要素,以人-车-路耦合机理解析、车-路-网协同运行优化为研究重点,围绕基础理论、运行优化、评估验证三层闭环框架开展了深入研究。基础理论层,通过“数据耦合-运动耦合-控制耦合”解析了人车路多要素耦合机理及交互作用机制;运行优化层, 提出了“车道资源-车辆轨迹-交通信号”的协同优化方法;评估验证层,通过“场景设计-模拟仿真-实地测试”实现了模型适应性评估与优化反馈。
项目秉承了“聚焦未来、问题驱动、协同创新”的原则,研究了车路协同系统要素耦合机理与协同优化方法,汇聚培养了一支具有国际学术影响力和技术创新力的研究团队。
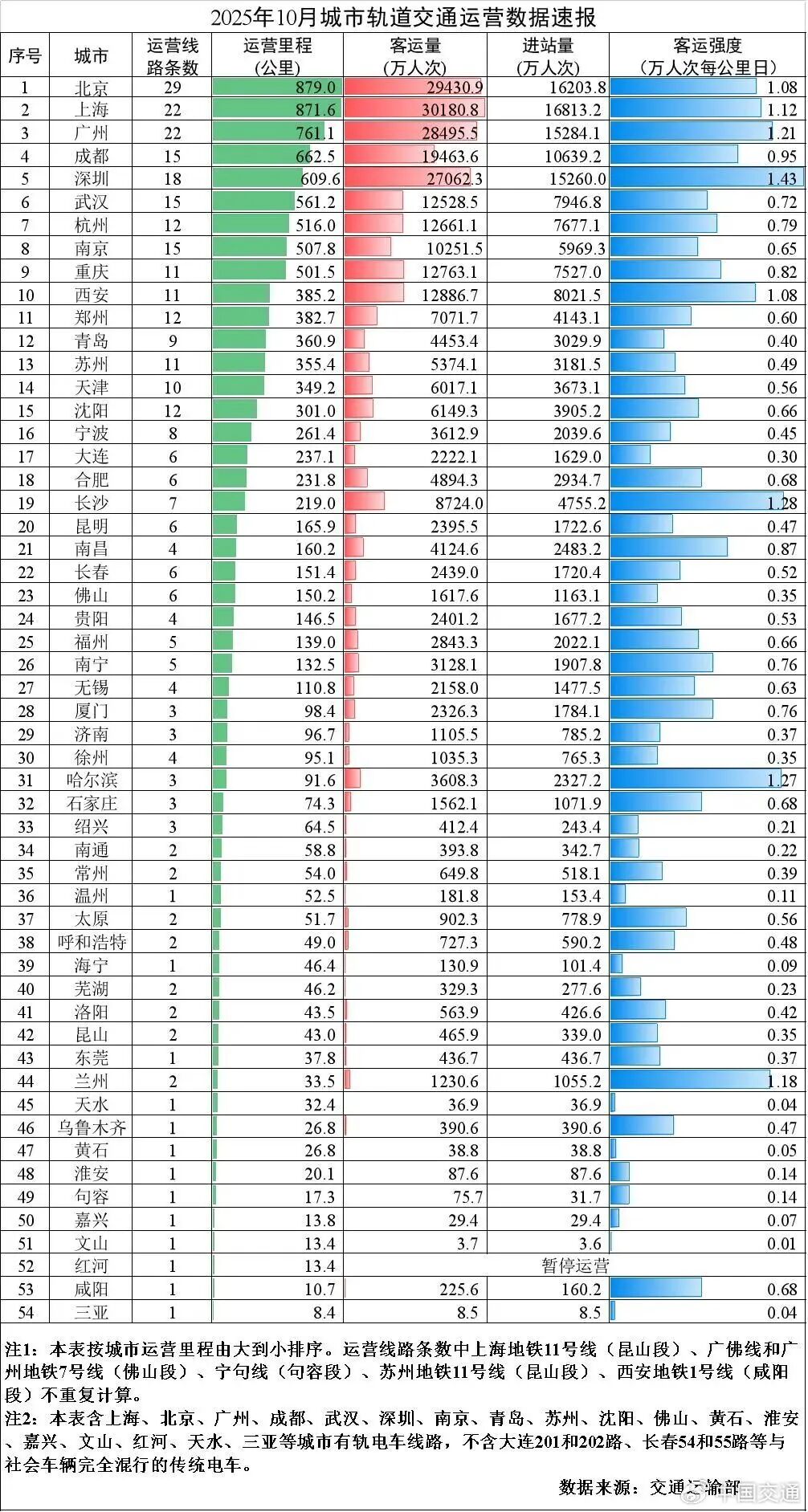
轨道交通展消息 根据提供的2025年10月中国城市轨道交通运营数据,以下进行深入分析。分析将涵盖总体运营规模、客运量变化、运营效率、系统类型对比、进站量与客运量关系、运营管理等方面,并结合数据揭示趋势和隐含问题。 1. 总体运营规模 城市覆盖与网络扩展:2025年10月,全国54个城市开通运营城市轨道交通,线路333条,运营里程达11330.5公里。这表明中国城市轨道交通网络已非常庞大,覆盖了绝大多数主要城市,成为城市公共交通的骨干。 客运量巨大:月客运量28.2亿人次,进站量16.8亿人次,日均客运量约9096.77万人次。开行列车376万列次,平均每日开行约12.13万列次。这些数字凸显了城市轨道交通在日常通勤中的关键作用,有效缓解了城市交通压力。 无新开通线路:本月无新开通线路,但运营里程环比可能有所增加(计算显示环比增加约474公里),可能源于现有线路的延伸或调整,而非全新线路投入运营。 2. 客运量变化趋势 环比增长显著:客运量环比增加1.3亿人次,增长4.8%。这种短期增长可能受季节性因素影响,如10月黄金周假期带来的出行需求增加,或经济活动的短期复苏。 同比增长放缓:客运量同比增加0.5亿人次,增长1.8%。同比增长率较低,可能反映市场接近饱...
合作邮箱:chinaiut@sgexpo.cn
新闻热线:021-3114 8748
广告/媒体合作:13916277698
转载内容版权归作者及来源网站所有,本站原创内容转载请注明来源
Copyright © 晟格会展(上海)有限公司 版权所有 Powered by Tp沪ICP备18026942号-6 ![]() 沪公网安备 31011302006543号
沪公网安备 31011302006543号




