




文章摘要
高速磁浮交通系统采用长定子直线同步电机驱动技术,直接影响系统的最高速度、加减速能力和运行效率,也与悬浮系统和导向系统强耦合,进而会影响系统的安全性、经济性和舒适性。文章分析了国内外高速磁浮交通系统驱动技术,论述了高速磁浮长定子直线同步电机的现状与不足,在对存在问题和挑战进行讨论的基础上,围绕优化长定子直线同步电机结构、精确计算长定子直线同步电机复杂变工况高速运行动态性能和复杂应用环境适应性设计3个问题,提出了针对600 km/h速度级高速磁浮交通系统驱动技术研究与开发的建议。
")
文章速览
高速磁浮交通系统结合了电磁悬浮技术与长定子直线同步电机驱动技术,依靠电磁力实现了车辆与轨道之间的无接触运行,为了凸显在高速交通领域的优势,提高运行速度一直是该领域的研究热点。在该系统中,车辆运行的牵引力与悬浮力都依靠同一个磁场——悬浮磁场,该磁场大小由悬浮系统承担的垂向力与悬浮高度决定,且随着车辆运行姿态动态变化,因此驱动系统的牵引性能不仅与悬浮系统、导向系统强耦合,而且与运行速度紧密相关。目前的高速磁浮交通系统主要指来自于德国的常导高速磁浮(Transrapid, TR)系列,其最高设计速度为500 km/h,采用该技术的上海磁浮列车示范运营线(简称上海磁浮线)最高试验速度可达501 km/h,最高运营速度为430 km/h,多年运行经验积累,验证了500 km/h速度级高速磁浮交通系统的成熟性,也促使600 km/h速度级高速磁浮列车进入了工程化研究阶段。
600 km/h速度级高速磁浮交通系统工程化研究目前处于初级发展阶段,没有先例可循。为了有高速测试的条件,目前600 km/h速度级试验样车驱动系统采用了现有上海磁浮线的长定子直线同步电机方案。与500 km/h车辆相比,该样车最高运行速度提高了100 km/h,因此地面变流系统输出最高频率从269.2 Hz提升至323 Hz,输出容量也从15 MV⋅A提升至24 MV⋅A。虽然经过牵引变流系统的扩容与改进,该长定子直线同步电机方案仍然可用,但电机端电压升高、损耗增加、电流增大等也给电机运行可靠性带来了很大挑战,是否还是最佳方案需要进行深入研究。同时,驱动系统的性能受速度影响非常大,一方面,600 km/h速度运行时车辆的气动升力变化,使悬浮系统承担的垂向力降低,导致平均悬浮磁场减小,若要保障车辆的高速运行能力就需要增大牵引变流系统的容量,否则高速时候的牵引能力将下降;另一方面,600 km/h高速运行车辆的横向晃动严重,使得导向间隙发生快速波动,不仅给导向系统稳定运行带来极大的挑战,而且直接影响驱动系统的牵引性能。目前没有600 km/h速度级高速运行的实际结果,已有的低速试验并不能完全验证高速牵引能力。因此,加快600 km/h速度级高速磁浮交通系统大容量长定子直线同步电机的结构优化与创新、复杂变工况多维数学模型和复杂应用环境适应性设计等研究,对中国600 km/h速度级高速磁浮交通系统的工程化应用具有重要战略意义。
一、高速磁浮交通系统驱动技术的发展与现状
高速磁浮交通系统成果最显著的是德国,其研究开展也较早,先后研发出9代TR系列磁浮列车。TR05开始一直采用长定子直线同步电机驱动技术,这也是现有TR系列磁浮车辆的基础,其示范线于1977年在汉堡国际交通博览会上展出。随后,德国在埃姆斯兰建造埃姆斯兰高速磁浮试验线(Transrapid-Versuchsanlage Emsland, TVE),成为了后续磁浮车辆的测试平台;在此线路上,测试了设计速度400 km/h的TR06、面向应用的TR07和为柏林—汉堡磁浮铁路开发的TR08磁浮列车。通过TVE试验线验证了TR08工程化应用的水平,2001年为上海磁浮线设计了面向工程应用的TR08。为当时规划的慕尼黑机场线设计的TR09则在2008年上线试验,最高设计速度为350 km/h。由此可见,TR06~TR09测试都基于TVE试验线,因此驱动系统采用了相同的长定子直线同步电机方案。
在TR05到TR09的发展过程中,德国对驱动系统长定子直线同步电机的结构、设计、分析与测试等进行了相应的研究,为该类电机的设计与分析奠定了理论基础,研究表明高速磁浮交通系统在运行速度上具有明显的优势,技术也达到了工程化应用水平。然而,德国人口分布相对均匀,不存在能够突出磁浮交通系统速度优势的长距离、大运量运输通道,且其建造成本高于轮轨高速铁路,与既有铁路网络的兼容也比较困难,随着汉堡—柏林等规划线路的取消,高速磁浮交通技术的研究逐渐减少,在TR09后基本停滞。
中国一直以来都很重视高速磁浮交通的研究与开发。少数高校、科研单位在20世纪70年代就开始关注磁浮交通系统新技术,开展常导磁浮列车的基础性研究试验工作,探讨国际磁浮列车技术发展和研究在中国实现的可能性。1996年4月科技部开始了“磁悬浮列车重大技术经济问题研究”软课题研究,实地考察了日本、德国的磁浮交通技术,并对3种磁浮交通技术进行了专题分析。1999年底科技部把“我国第一条高速磁浮列车试验运行线可行性研究”列入“九五”攻关软课题,进一步消化了德国TR高速磁浮列车的技术,比较了试验运行线的选线方案,提出了在上海建造示范运营线的建议。伴随着上海磁浮线的开工建设,科技部设立了“十五”国家高技术研究发展计划“高速磁浮交通技术研究”重大专项,消化吸收了德国TR系列磁浮列车牵引、运行控制及轨道技术,研制了试验列车并建造了1.5 km的试验线。2016年开始研发600 km/h速度级高速磁浮交通技术和设备,于2021年7月试验样车在青岛成功下线,已基于现有试验线路完成了低速验证。
虽然中国高速磁浮交通系统研究晚于德国,但中国幅员辽阔,大运量高速交通的需求非常迫切,例如京沪、京杭等长大干线线路;成渝、汉宁等距离500 km左右的线路,因此在研究投入、产业化与更高速车辆研发方面都后来居上,走在了世界前列。在这个过程中,研究人员在长定子直线同步电机的性能分析、参数计算、仿真建模、半实物仿真、驱动控制、测试技术等方面进行了较多的研究,基本都围绕TR08长定子直线同步电机结构。600 km/h速度级磁浮试验样车受限于测试条件,也采用了同样的电机结构,因此针对600 km/h运行条件下直线电机的结构优化、高速运行性能计算和复杂应用环境适应性设计等研究仍然存在较多不足,迫切需要进行系统的理论研究。
二、上海磁浮线驱动系统结构
上海磁浮线基于德国的TR08技术,驱动系统采用的是直线同步电动机。在电机结构中,通常三相电源输入侧作为定子,因此在该直线同步电机中也把三相电源输入侧称为定子,其铺设在整个轨道两侧下方,即定子长度等于轨道长度。励磁(悬浮)电磁铁部分则称为动子,安装在车辆底部两侧,因此动子长度基本等于车辆长度。由于定子长度远大于动子长度,所以称为长定子直线同步电动机。车辆运行时,为了不浪费电能,不能给整个线路的定子绕组都供电,具体实现方式是三相定子绕组分段,每段长度超过车辆的长度,只有磁浮列车所在的定子绕组段通电。每个定子段输入端都连接开关站,等车辆运行到该段,由控制系统触发开关站处于接通状态,就把地面的变频电源馈入该定子段。通过逐个接通各段的开关站,实现车辆走到哪里电源通到哪里的高效运行方式。定子段接入三相变频电源后,产生一个直线运动的定子行波磁场,动子通入直流励磁电流产生悬浮磁场,励磁电流在车辆低速时由车载蓄电池或轨道上的供电轨提供,在车辆运行速度超过一定值后则由车载直线发电机这种无接触供电方式提供,定子行波磁场牵引动子悬浮磁场同速同方向运行,使得车辆在线路上按设定的牵引特性运行。这种运行方式下,为了保障切换性能,每段定子都比动子要长,多出的定子部分不产生牵引力,但其与线路电缆一样会产生压降与损耗,影响电机的性能。
2.1 驱动系统电机结构
上海磁浮线牵引悬浮系统结构示意图和纵断面图如图1所示,定动子都为模块化结构,工程应用性好。由图1(a)可见,长定子在轨道两侧下方的边缘部分,如图1(b)所示。为了加工与安装方便,图中的黄色长定子铁芯采用分段结构,也称为定子铁芯段,通常一段为4个极,长度约1 m,其采用自带胶水的硅钢片叠压加热固定成形,然后外部再进行环氧封装,满足室外长时间应用的需求。定子铁芯段在工厂加工完成,每段背部带有固定燕尾键,在轨道上由螺栓固定。图中黑色的定子三相绕组采用单根多芯电缆,在工厂预制成形,在轨道上连续嵌入每个定子铁芯段中,一段三相绕组约1.2 km长。动子上的悬浮电磁铁由多个模块拼接而成,一个模块包含12个极,长约3 m,如图1(c)所示,中间部分的电磁铁表面安装了直线发电机,实现无接触给车辆设备供电。为了轻量化,三相绕组与励磁绕组都采用了铝导体。
由图1(d)的纵断面图可见,动子与定子铁芯正面相对,悬浮电磁铁通入直流电后就产生了悬浮磁场,在定动子之间产生了很大的吸引力,因为定子固定在轨道上,该吸引力就把动子吸向轨道,使得车辆抬高处于悬浮状态,因此也被称为悬浮力。悬浮磁场由悬浮系统根据悬浮高度实时调节,产生跟垂向力平衡的悬浮力,由于垂向力包括车辆重量与气动升力,所以悬浮磁场受到气动升力的影响。车辆悬浮后,该悬浮磁场就成为了长定子直线同步电机的励磁磁场。定子三相绕组通入变频电流产生直线运动的行波磁场,牵引着该励磁磁场,使得动子同速同向运动。由此可见,跟普通同步电机不同,高速磁浮驱动系统不能主动控制悬浮磁场,而且悬浮高度与导向间隙随着车辆运行存在动态变化,其牵引性能计算需要考虑悬浮系统与导向系统的耦合影响。
2.2 关键结构参数
长定子直线同步电机是高速磁浮交通系统的牵引部件,而励磁磁场需由悬浮电磁铁提供,因此该长定子直线同步电机与悬浮系统的结构参数强耦合,在结构设计与性能分析时需要把长定子与动子悬浮系统一起建模计算。电机设计需要确定的结构参数有很多,最关键的是车辆悬浮高度、定子极距和动子极距,这是因为这3个参数不仅与驱动系统与悬浮系统强耦合,而且影响着高速磁浮交通系统车辆与轨道的设计。
悬浮高度由悬浮系统决定,通常约10 mm。定子极距指的是定子行波磁场波长的一半,动子极距指的是悬浮磁场波长的一半,在设计与运行时都需要保障两者基本相同,否则会降低牵引性能。由此可见,对高速磁浮车辆来说,定子极距是最关键的结构参数。当定子极距确定后,其他结构参数与牵引供电系统方案也随之确定,直线电机的运行性能也就可以计算,从而决定了直线电机的运行性能。
定子极距由车辆运行速度与变流电源频率共同决定。当车辆运行速度一定时,如果极距取值过小,则电源频率增大,由于悬浮高度比较大,这种情况下电机漏磁会增加,电机性能降低;反之,如果极距取值过大,在直线电机定动子高度保持不变时,定子与动子磁路容易饱和,也会降低电机的性能。为了解决这个问题,需要同时增大电机定子与动子的高度,导致电机的体积与重量提升。因此,长定子直线同步电机定子极距是非常关键的结构参数,过大或过小都会恶化系统的驱动性能与悬浮性能,需要根据运行速度来优化选择。
目前TR08系列采用的定子极距为0.258 m,由可关断晶闸管器件构成的逆变装置来提供变频电源,频率变化范围为0~300 Hz,其最高设计速度为505 km/h,此时电流频率为271.86 Hz,满足变流器频率范围。中车青岛四方机车车辆股份有限公司研发的600 km/h工程样车保持了0.258 m的定子极距,电流最高频率约为323 Hz,显然已经超出了TR08变流器的频率范围,同时牵引系统的容量和输出电压也超过了TR08的范围,因此600 km/h试验样车变流器采用了可控性更好的集成门极换流晶闸管(Integrated Gate-Commutated Thyristor, IGCT)器件,提高了牵引变流器的容量与频率,同时通过增大输出变压器变比提升了牵引变流系统的输出电压,满足了车辆600 km/h运行的需求,但是该驱动系统是否为最优方案还需要进一步研究。
2.3 电机效率
长定子直线同步电机的定子损耗主要由三相绕组的铜耗和定子铁芯中的铁耗组成,铜耗由定子电流、绕组电阻来决定,低速运行时车辆加速度大、电流大,铜耗也增大;而高速运行时车辆加速度小、电流小,铜耗也降低。绕组铜耗也与长定子段长度相关,长定子段长度越长,则铜耗越大。铁耗则与电源频率相关,随着频率增大,铁耗增大。当速度提升至600 km/h时,车辆的加速距离与加速时间都变长,频率也增大,铜耗与铁耗都会相应增大。
动子悬浮系统也存在励磁绕组铜耗与励磁铁芯铁耗,但由于其由车载电源供电,长定子直线同步电机效率计算通常不考虑动子损耗,所以只由定子损耗来决定。随着运行速度提升至600 km/h,如果保持长定子直线同步电机的结构不变,则电机的电流与损耗都会增大,导致热负荷增加、效率降低。
三、600 km/h速度级高速磁浮交通系统驱动技术的问题与挑战
高速磁浮是复杂的流固-电磁-机电紧耦合系统,牵引与悬浮都依靠长定子直线同步电机,运行过程中悬浮高度依靠悬浮系统实时调节,导向间隙依靠导向系统实时调节。当运行速度由430 km/h提升至600 km/h,气动性能、车轨耦合、系统耦合等条件发生了变化,对长定子直线同步电机高速运行的牵引能力、动态运行系统协同及高精度同步控制提出了更高的要求。
600 km/h速度级高速磁浮交通系统项目借鉴高铁“仿真分析—台架试验—线路试验”循环迭代优化的成熟研发经验,通过搭建系统集成、车辆、牵引供电、运行控制通信及线路轨道的地面试验台和调试试验线来进行部件及系统线路研发与验证,再修正仿真边界及算法优化设计。虽然该验证方法验证了长定子直线同步电机具有600 km/h运行的能力,但由于缺少实际线路的高速运行,并不能充分验证作为牵引核心的现有长定子直线同步电机设计方案的有效性和高效性。为了保证600 km/h高速磁浮驱动系统的达速稳定高效运行,还需解决以下问题与挑战。
高速磁浮是复杂的流固-电磁-机电紧耦合系统,牵引与悬浮都依靠长定子直线同步电机,运行过程中悬浮高度依靠悬浮系统实时调节,导向间隙依靠导向系统实时调节。当运行速度由430 km/h提升至600 km/h,气动性能、车轨耦合、系统耦合等条件发生了变化,对长定子直线同步电机高速运行的牵引能力、动态运行系统协同及高精度同步控制提出了更高的要求。
600 km/h速度级高速磁浮交通系统项目借鉴高铁“仿真分析—台架试验—线路试验”循环迭代优化的成熟研发经验,通过搭建系统集成、车辆、牵引供电、运行控制通信及线路轨道的地面试验台和调试试验线来进行部件及系统线路研发与验证,再修正仿真边界及算法优化设计。虽然该验证方法验证了长定子直线同步电机具有600 km/h运行的能力,但由于缺少实际线路的高速运行,并不能充分验证作为牵引核心的现有长定子直线同步电机设计方案的有效性和高效性。为了保证600 km/h高速磁浮驱动系统的达速稳定高效运行,还需解决以下问题与挑战。
1)优化长定子直线同步电机结构
现有600 km/h车辆仍然采用TR08的长定子直线同步电机设计方案,通过提升变流器容量、运行频率并提高输出变压器变比来提升电机端电压的技术手段,将运行速度由500 km/h提升至600 km/h,但是长定子直线同步电机的损耗与热负荷都增加,此时系统性能、效率、经济性均发生了变化,需要根据600 km/h的运行速度对电机进行结构优化,得到最优方案。与此同时,随着电力电子技术的发展与绝缘技术的发展,制约长定子直线同步电机结构设计的电压与频率范围都得到了提升,从而可以突破现有拓扑结构的约束,尝试新型长定子结构的研究,得到更高效的新型长定子结构方案。经过结构优化与创新,将获得优化的长定子直线同步电机方案,能够提高线路的经济性与运行效率。
2)精确计算长定子直线同步电机复杂变工况高速运行动态性能
600 km/h速度级高速磁浮交通系统的车轨耦合作用增强,对于长定子直线同步电机来说,高速运行时车辆受到的不均匀分布的升力及波动会引起悬浮高度动态变化,也会导致悬浮磁场减弱及不均匀分布;高速运行时车辆的横向晃动增大,从而也增大了导向气隙的变化,减小了电机的牵引力与悬浮力,并给导向系统产生了附加的导向力;600 km/h运行时,检测与控制信号的延时影响增大,使得牵引力下降,需要计算延时影响并提出补偿策略;同时,线路过轨缝等特殊情况影响也变得明显。以上这些都会降低600 km/h运行时电机的运行性能。为了保证高速运行的可靠性与舒适性,需要精确计算高速运行复杂变工况下电机的性能,为直线电机与牵引控制系统优化设计提供理论支持。
3)研究复杂应用环境适应性设计的关键问题
600 km/h速度级高速磁浮交通系统比较适用于大通量长大干线,例如京沪、京杭等线路。高速与长大干线带来了很多新的问题,这些是目前运行情况单一、线路短的上海磁浮线中没有遇到的。长线路运行时环境变化大,会使得电机运行性能发生变化,例如温度变化导致的热胀冷缩,此时长定子固定在轨道上定子极距基本保持不变,但是动子悬浮磁铁极距则会随着车厢的热胀冷缩而变化,使得定子极距与动子极距发生偏差,导致牵引力下降,在长编组条件下情况会更严重,因此直线电机设计时需要考虑这些工况下的影响;在低速区域与高速区域电机要求的输入电压不同,提高系统效率需要优化的分区长度,同时长大干线运行线路将是多车运行,需要提出合理的运营规划与设计原则。因此,需要研究线路适应性设计的关键问题,针对线路实际情况提出优化结构,提高线路设计的适应性,同时为分区优化与运营规划提供参考,提升长定子直线同步电机的线路运行效率与经济性。
四、600 km/h速度级高速磁浮交通系统驱动技术发展建议
600 km/h速度级高速磁浮交通系统技术的发展,给中长距离城市间的大运量交通带来了希望,未来发展前景广阔。驱动系统的长定子直线同步电机是高速磁浮交通系统的关键部件。随着材料技术、控制技术、设计技术和计算能力的提升,长定子直线同步电机相关的基础理论和关键技术都亟待深化研究和提升。600 km/h速度适用性研究、高速运行多源扰动多维电机模型、复杂应用环境适应性设计理论等科学问题和关键技术,是目前长定子直线同步电机驱动领域研究的热点和难点。
4.1 适配600 km/h速度级高速磁浮交通系统长定子直线同步电机铁芯与绕组新结构
自TR06后,高速磁浮交通系统长定子直线同步电机的拓扑结构一直保持不变,设计受限于当时的材料技术、控制技术与电力电子技术。虽然通过牵引变流系统的改造与升级,可以将设计速度提升至600 km/h,但运行效率、线路经济性等都受到了限制,长编组车辆长大干线应用时也存在定动子极距失配导致的牵引力下降风险。经过这些年的发展,电机的设计技术、材料技术、驱动技术、电力电子技术与绝缘技术都得到大幅度提升,因此长定子直线同步电机结构设计的约束变少,拓扑结构选择的自由度更大。突破现有拓扑结构的约束,尝试新型长定子结构的研究,包括新型的铁芯结构与绕组结构,得到适配600 km/h速度级高速磁浮交通系统的新型长定子结构方案,从而提高线路运行的经济性,具有重要的理论意义与实用价值。
4.2 直线电机全速域多源扰动服役条件下多维动态建模与分析
600 km/h速度级高速磁浮交通系统属于强耦合系统,悬浮导向主动控制形成自激振动,受轨道不平顺、桥梁挠度变形、错台接缝、横向晃动等外界激扰影响,使得长定子直线同步电机与车辆运行姿态、驱动控制系统、悬浮控制系统及运行温度等都紧密相关,磁场之间强耦合。为了提高车辆的运行性能,需要加快研究实际服役下电机高速运行多源扰动多维模型,掌握其动态特性。因此,需要考虑车体姿态引起的导向与悬浮气隙变化、气动升力导致的悬浮电流变化、检测与控制信号延时导致的电流角度变化、电机故障与特殊线路路况等多源扰动复杂工况,研究长定子直线同步电机模型参数的时变非线性规律,建立基于场路结合的电机与牵引供电一体全速度域复杂变工况多维模型,仿真分析600 km/h高速运行多源扰动下电机的动态特性,为长定子直线同步电机的鲁棒牵引控制提供理论支持。
4.3 600 km/h速度级高速磁浮交通系统长定子直线同步电机全局优化
当磁浮列车运行速度达600 km/h,对于现有拓扑结构的长定子直线同步电机,如果继续保持定子极距与长定子段长度不变,则长定子段的电压升高,对电机绝缘提出了更高要求。同时,电流增大则会增加绕组损耗与线路损耗,频率升高则会导致更多的铁耗,此时系统性能、效率、经济性等都受到影响,需要加快现有拓扑结构长定子直线同步电机在600 km/h运行速度下的适用性研究。综合考虑材料的性能、变流器的输出性能,以电源频率、电源幅值、高可靠运行条件、运行环境等为约束条件,以效率、功率因数、推力密度、成本与悬浮力等为优化目标,采用基于精英策略的粒子群算法等全局优化算法进行多目标多变量优化,优化电机定子极距等关键结构参数,得到600 km/h速度级高速磁浮交通系统长定子直线同步电机的优化结构,尤其是最关键的结构参数定子极距。同时,基于大量的分析数据,采用支持向量机算法、克里金算法等建立快速非参数优化模型,结合非支配排序遗传算法进行结构优化,为快速工程设计提供理论支持。经过多目标优化设计,获得适用于600 km/h速度级高速磁浮交通系统长定子直线同步电机的优化结构,保障系统的高效稳定运行。
600 km/h速度级高速磁浮交通系统适用于长大干线,长线路运行导致应用环境复杂,保障整个线路的可靠运行非常重要,因此需要加快复杂应用环境的适应性研究。需要考虑电机的高频非正弦激励、谐波磁场、边端效应,以及线路的环境温度与路况、车辆的运行姿态、运营规律、热胀冷缩等复杂变工况,建立电、磁、热与力的耦合模型,综合分析长线路非连续运行条件下的牵引力、损耗与温升,包括长定子损耗及动子磁极损耗,提出减小损耗的措施及有效的热管理方法,提出长线路运行效率优化的分区设计方法,掌握长距离运行环境变化引起的定动子极距失配对电机性能的影响,从而建立适应于复杂应用环境长定子直线同步电机的设计理论,保障车辆的可靠经济运行。
结语:长定子直线同步电机是600 km/h速度级高速磁浮交通系统达速稳定运行的核心部件,其设计和优化对系统效能的提升至关重要。加速开展适配600 km/h速度级高速磁浮交通系统长定子直线同步电机铁芯与绕组新结构、直线电机全速域多源扰动服役条件下多维动态建模与分析、600 km/h速度级高速磁浮交通系统长定子直线同步电机全局优化等关键技术研究,系统建立中国自主可控的600 km/h速度级高速磁浮交通系统长定子直线同步电机分析理论方法与设计优化技术,对于中国高速磁浮交通系统的工程化与规模应用意义重大。

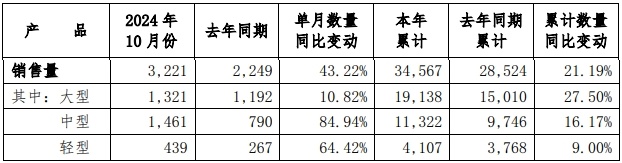
国际客车展获悉,11月5日,宇通客车股份有限公司发布2024年10月份产销数据快报。快报显示,2024年10月,宇通客车实现销售3221辆,同比增长43.22%。其中,大型车1321辆,同比增长10.82%;中型车1461辆,同比增长 84.94%;轻型车439辆,同比增长64.42%。 宇通客车作为国内客车行业的领军企业,一直以来以其卓越的产品质量、先进的技术和完善的售后服务在市场中占据重要地位。随着国家对新能源汽车的大力支持和推广,宇通客车积极响应政策号召,加大新能源客车的研发和生产力度,为宇通客车的销售增长提供了新的动力。同时,国家对公共交通的投入不断增加,城市公交、旅游客运等领域的需求持续增长,也为宇通客车的发展提供了广阔的市场空间。 特别推荐:上海国际客车展参观报名 上海国际客车展展位预定
合作邮箱:chinaiut@sgexpo.cn
新闻热线:021-3114 8748
广告/媒体合作:13916277698
转载内容版权归作者及来源网站所有,本站原创内容转载请注明来源
Copyright © 晟格会展(上海)有限公司 版权所有 Powered by Tp沪ICP备18026942号-6 ![]() 沪公网安备 31011302006543号
沪公网安备 31011302006543号




